来源:高分子科学前沿
蜘蛛丝(S-silk)被誉为超级纤维,是世界上最坚韧的天然材料之一,其性能优于目前最好的高性能合成纤维。例如,Nephila pilipes蜘蛛丝的韧性约为160 MJ/m3,而防弹衣所用材料Kevlar的韧性约为50 MJ/m3。众所周知,肢体的缺失会严重影响一个人的生活质量。因此,研究人员在积极探索了具有与人的肢体相似性能的机器人以用作假体。其中,肌腱驱动的传输系统是核心组件,需要类似于人肌腱的纤维将动力从执行器传输到关节。
然而,当前由尼龙、硅橡胶或聚对苯二甲酸乙二醇酯(PET)制成的肌腱纤维具有低韧性,因此不能承受多次弯曲和拉伸循环。同时,这些纤维在狭窄的肌腱路径会遭受很大的摩擦,进一步降低了其耐久性。故将传输自传感系统的电信号的电线和其它纤维作为肌腱整合到人手大小的细长机器人手指上仍面临巨大挑战。此外,基于聚合物的导体通常表现出低韧性(<100 MJ/m3)和低导电性(<100 S/cm)。
虽然金、铝和铜等传统金属具有良好的导电性,但它们的韧性较低(~1-10 MJ/m3),因此这些材料不适合机器人应用。因此,目前还没有同时具有高韧性、导电性和可拉伸性的材料或系统用于机械工程应用。基于此,新加坡南洋理工大学的陈晓东教授和浙江大学的李德昌副教授(共同通讯作者)联合报道了一种基于蜘蛛丝的超强韧性肌腱,其韧性为420 MJ/m3、电导率为1077 S/cm(图1a),其性能优于目前的柔性和可拉伸导体。
该电肌腱由Nephila pilipes蜘蛛丝、单壁碳纳米管(SWCNT)和聚(3,4-乙烯二氧噻吩)-聚苯乙烯磺酸盐(PEDOT:PSS)制成。通过研究发现,该电肌腱在超过40,000次弯曲和拉伸循环后,其电导率没有任何变化。当安装到压力传感器上,并安装在3D打印的类似人的机器人手指上时,该电肌腱可以使机器人手指响应并捕获各种物体而不会损坏这些物体。因为电信号通过肌腱纤维从压力传感器和力信号到执行系统的稳定转移。由于电肌腱可以向驱动系统和传感系统传输信号,因此其可以安装在细长的机器人手指上,而无需额外的电线或电路组件,从而极大简化了任何机器人的设置。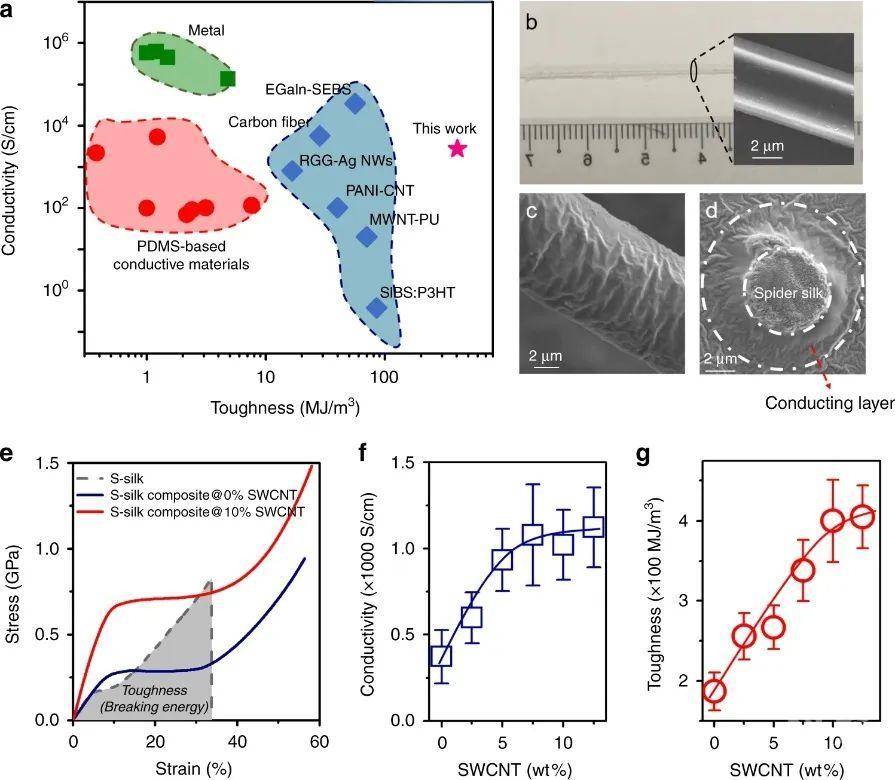 图1、蜘蛛丝复合材料的韧性和导电性【图文解读】如图1所示,由于亲水性PSS,PEDOT:PSS与加工后的S-silk具有良好的粘合性,从而形成保形的导电层。此外,将SWCNT引入到S-silk中以提高韧性。同时,SWCNT可以通过从PEDOT到SWCNT的电子密度转移来进一步提高S-silk的电导率。
图1、蜘蛛丝复合材料的韧性和导电性【图文解读】如图1所示,由于亲水性PSS,PEDOT:PSS与加工后的S-silk具有良好的粘合性,从而形成保形的导电层。此外,将SWCNT引入到S-silk中以提高韧性。同时,SWCNT可以通过从PEDOT到SWCNT的电子密度转移来进一步提高S-silk的电导率。
图1、蜘蛛丝复合材料的韧性和导电性【图文解读】如图1所示,由于亲水性PSS,PEDOT:PSS与加工后的S-silk具有良好的粘合性,从而形成保形的导电层。此外,将SWCNT引入到S-silk中以提高韧性。同时,SWCNT可以通过从PEDOT到SWCNT的电子密度转移来进一步提高S-silk的电导率。通过样品横截面的拉曼光谱中的G带确认了S-silk中存在SWCNT。随着SWCNT的重量百分比增加(0-12.5 wt%),G带的强度增加,但应力应变曲线直到12.5 wt%几乎保持不变。由于在12.5和10 wt%SWCNT的复合材料之间机械性能没有差异,故将含10 wt%SWCNT的蜘蛛丝复合材料用于机器人手指实验。耗散粒子动力学(DPD)模拟研究为了了解SWCNT如何在微观尺度上改善S-silk的力学性能,作者进行了DPD模拟。图2a-b显示了粗粒度S-silk复合材料的快照片。随着应变的增大,非晶结构中的氢键断裂。
在S-silk复合物中,SWCNT与丝蛋白之间的相互作用比不使用SWCNT时的强度更高。当压力进一步增加,由于SWCNT和丝蛋白之间的桥接效应,复合材料会经受更高的归一化应力(图2c-f)。在较低的临界应变下,S-silk复合材料比S-silk断裂更困难,表明该复合材料具有更高的韧性和更好的机械性能。在模拟中,将断裂定义为穿过任何横截面的桥数小于1。DPD模拟的韧性、杨氏模量和强度随SWCNT wt%的变化与实验数据非常吻合,表明SWCNT对于改善蜘蛛丝的机械性能非常重要。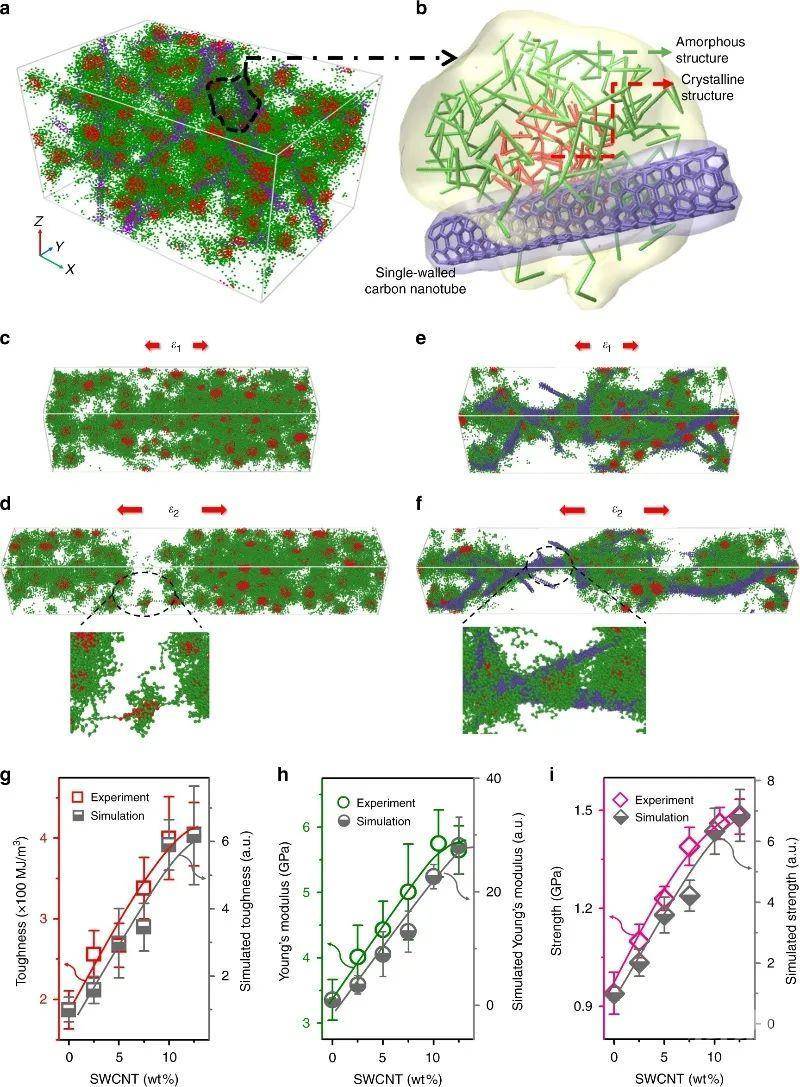 图2、DPD模拟中silk-SWCNT纳米复合材料的典型力学测试探究silk复合肌腱的耐久性接着,作者使用含有10 wt%SWCNT的S-silk复合材料作为电肌腱,将电肌腱连接到机器人手指的内侧,并使用基于硅树脂的伸肌将其固定在适当的位置。当食指完全弯曲时,测量了机器人手指相对于垂直轴的角度变化以及肌腱长度的变化。食指在静止状态下的初始角度约为8°,当手指从0到5.2 cm被肌腱牵拉到其最终状态时,角度变为73°,并且在整个弯曲过程耗时约1.5 s。为了确认S-Silk复合肌腱的耐久性,进行了循环弯曲试验,并将结果与其它肌腱材料(天然S-silk、尼龙纤维、PDMS纤维等)进行了比较,发现韧性更高的材料显然更耐久。基于韧性为420 MJ/m3的S-silk复合材料的手指在整个弯曲过程中可承受40,000次循环,几乎是天然S-silk的两倍。进一步测试了手指举重的能力,所有纤维的直径保持在0.3 mm。S-silk复合纤维的手指可以举起7.6 kg的重量(1051.1 N/mm2),与钢纤维的手指(1292.5 N/mm2)相当,但远高于尼龙的手指纤维(766.3 N/mm2)、商用碳纤维(604.7 N/mm2)、天然S丝(537.1 kg/mm2)和PDMS纤维(4.3 N/mm2)。
图2、DPD模拟中silk-SWCNT纳米复合材料的典型力学测试探究silk复合肌腱的耐久性接着,作者使用含有10 wt%SWCNT的S-silk复合材料作为电肌腱,将电肌腱连接到机器人手指的内侧,并使用基于硅树脂的伸肌将其固定在适当的位置。当食指完全弯曲时,测量了机器人手指相对于垂直轴的角度变化以及肌腱长度的变化。食指在静止状态下的初始角度约为8°,当手指从0到5.2 cm被肌腱牵拉到其最终状态时,角度变为73°,并且在整个弯曲过程耗时约1.5 s。为了确认S-Silk复合肌腱的耐久性,进行了循环弯曲试验,并将结果与其它肌腱材料(天然S-silk、尼龙纤维、PDMS纤维等)进行了比较,发现韧性更高的材料显然更耐久。基于韧性为420 MJ/m3的S-silk复合材料的手指在整个弯曲过程中可承受40,000次循环,几乎是天然S-silk的两倍。进一步测试了手指举重的能力,所有纤维的直径保持在0.3 mm。S-silk复合纤维的手指可以举起7.6 kg的重量(1051.1 N/mm2),与钢纤维的手指(1292.5 N/mm2)相当,但远高于尼龙的手指纤维(766.3 N/mm2)、商用碳纤维(604.7 N/mm2)、天然S丝(537.1 kg/mm2)和PDMS纤维(4.3 N/mm2)。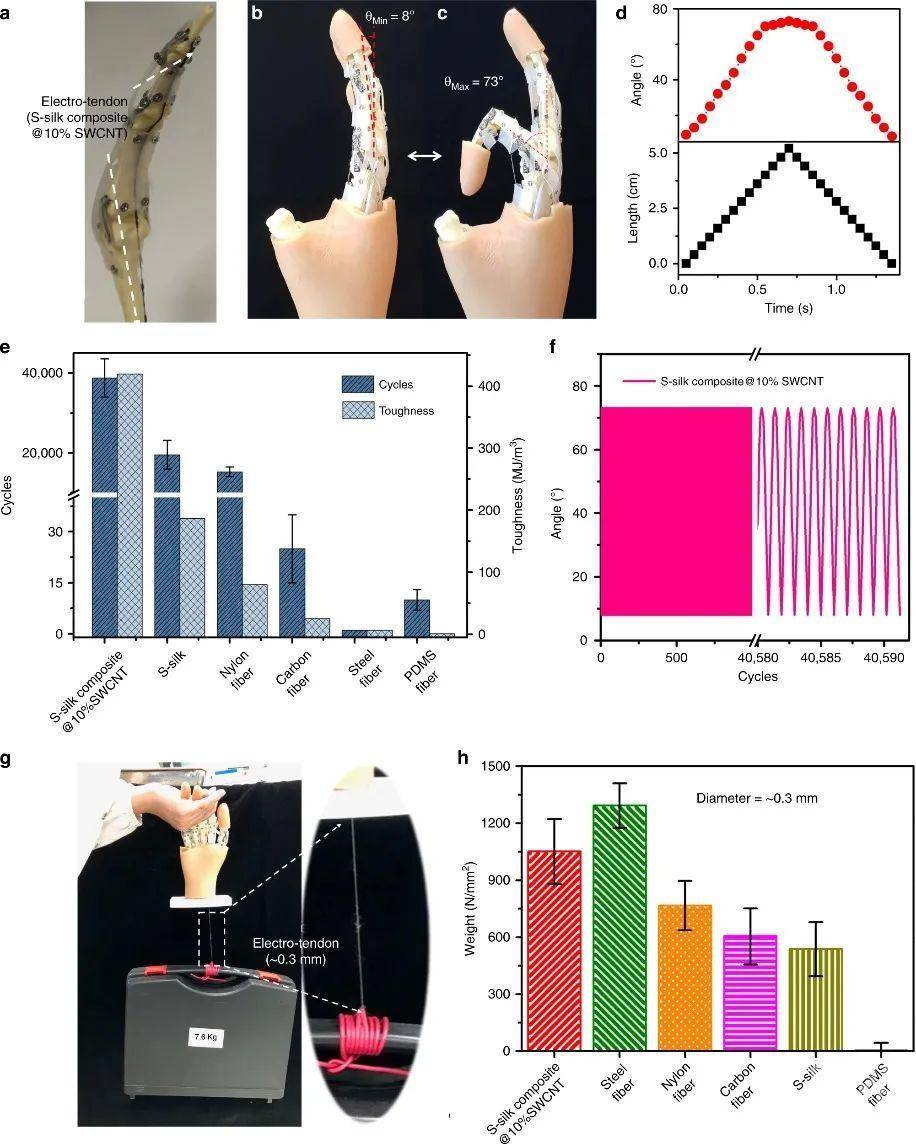 图3、S-silk复合肌腱装配在机器人手指上的性能基于肌腱的机器人手的反馈与抓握过程在机器人手的移动过程中,肌腱还需要稳定地传输来自反馈系统的信号。为此,作者设计了一种压力反馈系统,以使手在握住物体时能感觉到手指的压力。该压力传感器的灵敏度约为24.8 kPa-1,可以在4 ms之内检测到0-1 kPa的压力,满足抓握实验的要求。将压力传感器组装在食指的尖端,并通过100 kΩ的电阻将其连接到肌腱。当手指弯曲时,肌腱的电阻几乎保持不变。当我们以0、113、327和749 kPa的压力触摸传感器时,手指分别弯曲0°、19°、32°和43°。较高的力会导致较大的弯曲角度(Movie 3)。利用结合了S-silk复合电肌腱和压力传感器的机器人手来抓住绿色气球,而不会使其形状变形。当满足停止压力标准时,手指停止弯曲,使绿色气球保持在三个手指之间的位置。这种基于肌腱的机器人手显然足够灵巧,可以执行对日常活动有用的基本抓握功能。
图3、S-silk复合肌腱装配在机器人手指上的性能基于肌腱的机器人手的反馈与抓握过程在机器人手的移动过程中,肌腱还需要稳定地传输来自反馈系统的信号。为此,作者设计了一种压力反馈系统,以使手在握住物体时能感觉到手指的压力。该压力传感器的灵敏度约为24.8 kPa-1,可以在4 ms之内检测到0-1 kPa的压力,满足抓握实验的要求。将压力传感器组装在食指的尖端,并通过100 kΩ的电阻将其连接到肌腱。当手指弯曲时,肌腱的电阻几乎保持不变。当我们以0、113、327和749 kPa的压力触摸传感器时,手指分别弯曲0°、19°、32°和43°。较高的力会导致较大的弯曲角度(Movie 3)。利用结合了S-silk复合电肌腱和压力传感器的机器人手来抓住绿色气球,而不会使其形状变形。当满足停止压力标准时,手指停止弯曲,使绿色气球保持在三个手指之间的位置。这种基于肌腱的机器人手显然足够灵巧,可以执行对日常活动有用的基本抓握功能。 图4、人形机器人手抓取物体时的反馈过程参考文献:A supertough electro-tendon based on spider silk composites . Nature Communications, 2020, DOI: 10.1038/s41467-020-14988-5.
图4、人形机器人手抓取物体时的反馈过程参考文献:A supertough electro-tendon based on spider silk composites . Nature Communications, 2020, DOI: 10.1038/s41467-020-14988-5.
图2、DPD模拟中silk-SWCNT纳米复合材料的典型力学测试探究silk复合肌腱的耐久性接着,作者使用含有10 wt%SWCNT的S-silk复合材料作为电肌腱,将电肌腱连接到机器人手指的内侧,并使用基于硅树脂的伸肌将其固定在适当的位置。当食指完全弯曲时,测量了机器人手指相对于垂直轴的角度变化以及肌腱长度的变化。食指在静止状态下的初始角度约为8°,当手指从0到5.2 cm被肌腱牵拉到其最终状态时,角度变为73°,并且在整个弯曲过程耗时约1.5 s。为了确认S-Silk复合肌腱的耐久性,进行了循环弯曲试验,并将结果与其它肌腱材料(天然S-silk、尼龙纤维、PDMS纤维等)进行了比较,发现韧性更高的材料显然更耐久。基于韧性为420 MJ/m3的S-silk复合材料的手指在整个弯曲过程中可承受40,000次循环,几乎是天然S-silk的两倍。进一步测试了手指举重的能力,所有纤维的直径保持在0.3 mm。S-silk复合纤维的手指可以举起7.6 kg的重量(1051.1 N/mm2),与钢纤维的手指(1292.5 N/mm2)相当,但远高于尼龙的手指纤维(766.3 N/mm2)、商用碳纤维(604.7 N/mm2)、天然S丝(537.1 kg/mm2)和PDMS纤维(4.3 N/mm2)。图3、S-silk复合肌腱装配在机器人手指上的性能基于肌腱的机器人手的反馈与抓握过程在机器人手的移动过程中,肌腱还需要稳定地传输来自反馈系统的信号。为此,作者设计了一种压力反馈系统,以使手在握住物体时能感觉到手指的压力。该压力传感器的灵敏度约为24.8 kPa-1,可以在4 ms之内检测到0-1 kPa的压力,满足抓握实验的要求。将压力传感器组装在食指的尖端,并通过100 kΩ的电阻将其连接到肌腱。当手指弯曲时,肌腱的电阻几乎保持不变。当我们以0、113、327和749 kPa的压力触摸传感器时,手指分别弯曲0°、19°、32°和43°。较高的力会导致较大的弯曲角度(Movie 3)。利用结合了S-silk复合电肌腱和压力传感器的机器人手来抓住绿色气球,而不会使其形状变形。当满足停止压力标准时,手指停止弯曲,使绿色气球保持在三个手指之间的位置。这种基于肌腱的机器人手显然足够灵巧,可以执行对日常活动有用的基本抓握功能。图4、人形机器人手抓取物体时的反馈过程参考文献:A supertough electro-tendon based on spider silk composites . Nature Communications, 2020, DOI: 10.1038/s41467-020-14988-5.来源:Polymer-science 高分子科学前沿
原文链接:http://mp.weixin.qq.com/s?__biz=MzA5NjM5NzA5OA==&mid=2651727281&idx=4&sn=5fb2a567479713a48182df916d9a200b&chksm=8b4a37f4bc3dbee2380beb1b83cf6885bb3137b22ffb67f159ab80c76f618c90ed6d2b1d483d&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn



