来源:高分子科学前沿
 在海洋中,一些无脊椎动物除了爬,还会走、跳、游,而这些运动形式主要通过改变身体弯曲并借助周围环境来完成。例如,一种名为“西班牙舞娘”的海蛞蝓(图1A),通过躯干大幅度弯曲波动,实现短暂的游泳。
在海洋中,一些无脊椎动物除了爬,还会走、跳、游,而这些运动形式主要通过改变身体弯曲并借助周围环境来完成。例如,一种名为“西班牙舞娘”的海蛞蝓(图1A),通过躯干大幅度弯曲波动,实现短暂的游泳。受此启发,德国马克斯·普朗克人工智能系统研究院Metin Sitti等人设计了一种光响应性液晶凝胶(LCGs),实现软物质在水中快速、高效、可控的运动。还可以改变照射LCGs的位置和时间,使其具有爬行、行走、跳跃、游泳等多种运动模式。相关论文以“Bioinspired underwater locomotion of light-driven liquid crystal gels”发表在《PNAS》上,随后入选《Nature》杂志的研究热点(Research Hightlights)题目为“Soft robot takes cues from a sea slug’s swimming stroke”。
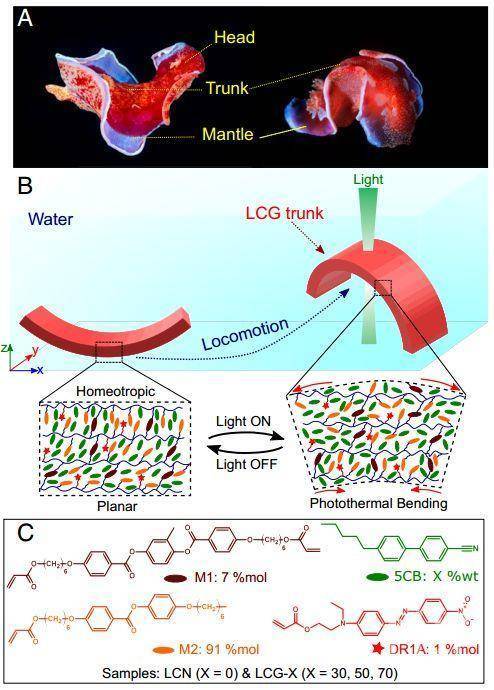 图1 (A)海蛞蝓形貌图;(B)仿生海蛞蝓的LCGs的结构;(C)各反应物结构交联液晶(LCN)是由图1C中单体M2和交联剂M1的混合物中加入光热剂DR1A后在光引发剂作用下形成的。LCGs则是在LCN中加入一定量的增塑剂5CB,将其由刚硬的物质变成了软凝胶。液晶显示器是通过长链分子响应电场发生移动而产生图像,与此类似,这些分子也可以对光做出响应:在光照作用下,凝胶中整齐排列的长链分子就会变得松散张开,促使凝胶弯曲。一个软体机器人在水下行走65毫米,大约需要108秒。
图1 (A)海蛞蝓形貌图;(B)仿生海蛞蝓的LCGs的结构;(C)各反应物结构交联液晶(LCN)是由图1C中单体M2和交联剂M1的混合物中加入光热剂DR1A后在光引发剂作用下形成的。LCGs则是在LCN中加入一定量的增塑剂5CB,将其由刚硬的物质变成了软凝胶。液晶显示器是通过长链分子响应电场发生移动而产生图像,与此类似,这些分子也可以对光做出响应:在光照作用下,凝胶中整齐排列的长链分子就会变得松散张开,促使凝胶弯曲。一个软体机器人在水下行走65毫米,大约需要108秒。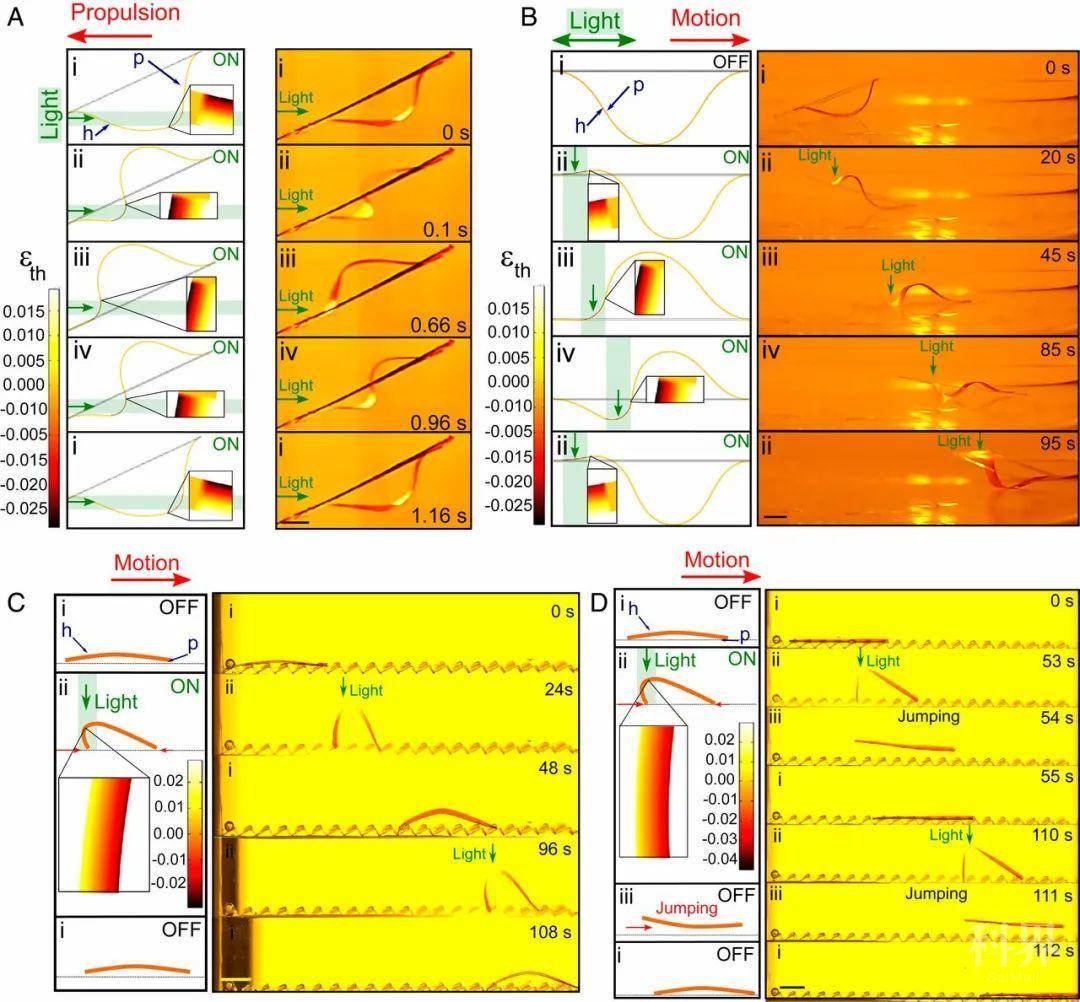 图2 (A)LCGs在光照作用下发生变形;凝胶在水中爬行(B)、行走(C)和跳跃(D)的运动模式与传统的光驱动材料不同,LCGs的清亮点TNI低于水沸点,是一种光热驱动材料,因此在水中能够更快速的发生形变。目前刺激响应性材料在水中环境发挥作用效率低,更无法实现对其精准的实时高效操控。因此,LCGs对于水中软体机器人的发展具有重要意义。
图2 (A)LCGs在光照作用下发生变形;凝胶在水中爬行(B)、行走(C)和跳跃(D)的运动模式与传统的光驱动材料不同,LCGs的清亮点TNI低于水沸点,是一种光热驱动材料,因此在水中能够更快速的发生形变。目前刺激响应性材料在水中环境发挥作用效率低,更无法实现对其精准的实时高效操控。因此,LCGs对于水中软体机器人的发展具有重要意义。
图1 (A)海蛞蝓形貌图;(B)仿生海蛞蝓的LCGs的结构;(C)各反应物结构交联液晶(LCN)是由图1C中单体M2和交联剂M1的混合物中加入光热剂DR1A后在光引发剂作用下形成的。LCGs则是在LCN中加入一定量的增塑剂5CB,将其由刚硬的物质变成了软凝胶。液晶显示器是通过长链分子响应电场发生移动而产生图像,与此类似,这些分子也可以对光做出响应:在光照作用下,凝胶中整齐排列的长链分子就会变得松散张开,促使凝胶弯曲。一个软体机器人在水下行走65毫米,大约需要108秒。图2 (A)LCGs在光照作用下发生变形;凝胶在水中爬行(B)、行走(C)和跳跃(D)的运动模式与传统的光驱动材料不同,LCGs的清亮点TNI低于水沸点,是一种光热驱动材料,因此在水中能够更快速的发生形变。目前刺激响应性材料在水中环境发挥作用效率低,更无法实现对其精准的实时高效操控。因此,LCGs对于水中软体机器人的发展具有重要意义。全文链接:https://www.pnas.org/content/early/2020/02/18/1917952117https://www.nature.com/articles/d41586-020-00563-x
来源:Polymer-science 高分子科学前沿
原文链接:http://mp.weixin.qq.com/s?__biz=MzA5NjM5NzA5OA==&mid=2651727149&idx=3&sn=6e4fd2f881f1c37bfda319fd4d68f145&chksm=8b4a3768bc3dbe7e3c43bf224794752fa47258350ff53f9efe07bd35dbec9865e446d736c942&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn



