仿生假肢,具有修复人体机能的潜力。然而,直觉运动控制、本体感觉和代表人类上肢功能标志的触觉之间,复杂的相互作用尚未揭示。近日,美国勒纳研究所生物医学工程系仿生集成实验室Paul D. Marasco团队,在Science Robotics上发文,报道了触摸、抓握运动觉和直观运动控制的神经机器人,融合了最新的行为表现水平,该水平朝着健全的功能,和远离标准护理假肢用户的方向分层。这是通过有针对性的运动和感觉神经再支配来实现的,这是一种闭环神经机器接口,与非侵入性机器人架构相结合。为运动控制添加触摸功能,可以提高达到预期目标抓握力的能力,在干扰器中找到目标硬度,并促进假肢所有权控制。在识别目标硬度和内在视觉运动行为时,触摸、运动感觉和运动控制,可以恢复平衡的决策策略,从而减少在物体交互过程中观察假手的需要,从而使眼睛,可以自由地观测下一个计划的动作。这三种方式的组合也增强了纠错性能。在这个神经机器接口中,统一的理论、功能和临床分析,能够定义同时运行的感觉和运动模式的相对贡献。这种多视角框架,提供了必要的证据,表明仿生假肢,通过有效的感觉运动恢复,获得了类似于人类机能。
图1 在神经机器人-人体集成双向仿生上肢假肢系统中,同时集成触摸、运动感觉和运动意图。
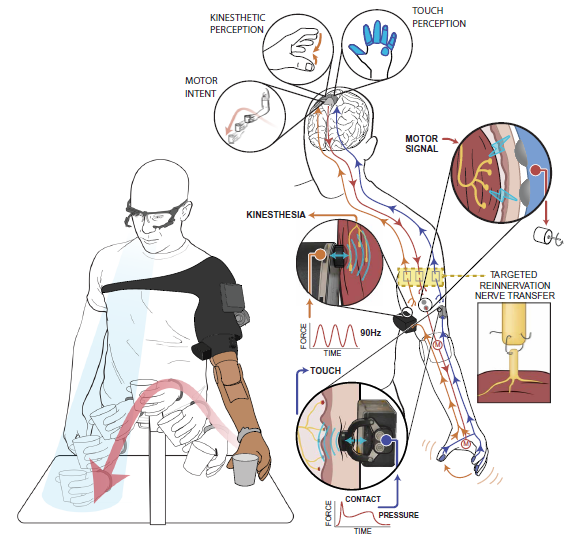
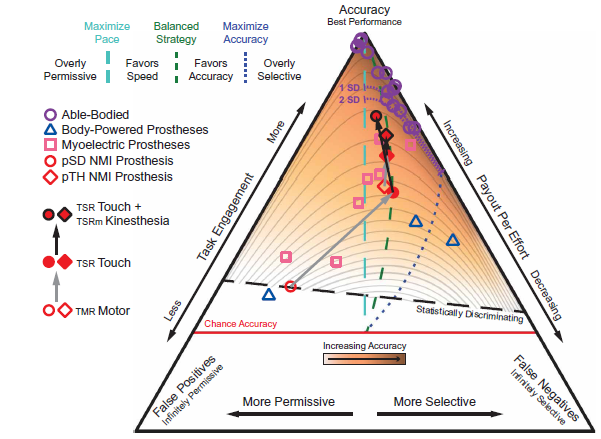
图2 神经机器人运动觉、触觉和运动意图将神经机器接口参与者与身体健全表现分层。
文献链接:https://www.science.org/doi/10.1126/scirobotics.abf3368
本文译自“Science”。
来源:gh_d06fa4463e84 今日新材料
原文链接:http://mp.weixin.qq.com/s?__biz=MzkwMTEzMjE5OQ==&mid=2247497145&idx=3&sn=e0e8b86fc9981f00233dd02ead96bf44
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn