近年来,柔性运动机器因具有交互友好、通用性强、适用领域广等优点,引起业界关注。然而,由于此类器件立足于柔性体结构变形的运动机制,与传统运动理论指导下的刚体机器的运动行为存在不同,因而对柔性对象实施有效、便捷的控制是一项挑战。在各类尝试中,依靠智能型柔性材料的特异性响应变化、着力研发控制系统是颇有前景的策略,此类材料可根据其响应变化的特征,实现预先编程,甚至可以擦除/重新编程,从而实现较好的、灵活的操纵性,但新型材料的开发和精细化操控尚非易事。如果考虑将理论成熟的模拟或数字控制范式用于柔性结构,则可以借助到许多现有成果,在控制原理、方案等方面得到有力的帮助;而刚性的电子元器件与柔性结构并不一定能完美兼容,在大规模使用的情况下,可能会出现新的适应性问题。因此,若能从硬件上对传统控制元器件加以革新,得到“柔软”的控制单元,还可以沿用发展成熟的相关控制理论,则有望实现人们对柔性机器进行较好控制的愿景。
近日,中国科学院理化技术研究所液态金属与低温生物研究中心提出并证实了一种新型的基于液态金属液滴实现的柔性逻辑门器件(AND、OR、NOT、NAND、NOR)、计算单元并由此控制全柔性机器的理论与技术途径,可望改观传统的柔性或刚体智能器件,相关研究成果发表在Advanced Intelligent Systems上。
研究系统展示了液态金属柔性逻辑单元的设计思想,并设计出两种类型的基础逻辑单元。其原理在于通过控制开关电压的大小、操控液态金属液滴在流道内的运动变形,以实现输出电路的导通或关断,从而使设备具备“打开-关闭”的二进制逻辑特征。基于该逻辑单元,可制备出一系列液体逻辑门结构,实现更多样的逻辑运算和电学信号输出,从而扩宽液体逻辑控制领域的应用前景。此外,设计制造柔性逻辑器件的最终目的之一,将其充分应用于柔性机器人的控制上,由此实现各种特定功能及行为。为展示该方面的应用,研究用LMS搭建了一个双路的控制单元,实现了对气压累加计算与控制,由此为气动抓手提供不同的输入压力,从而实现了该柔性结构在四种宏观外形状态下的灵活变化。
硕士研究生李东东和博士研究生刘天英为论文的共同第一作者,研究员刘静为论文通讯作者。研究工作得到国家自然科学重点基金与中科院前沿科学重点研究计划的支持。
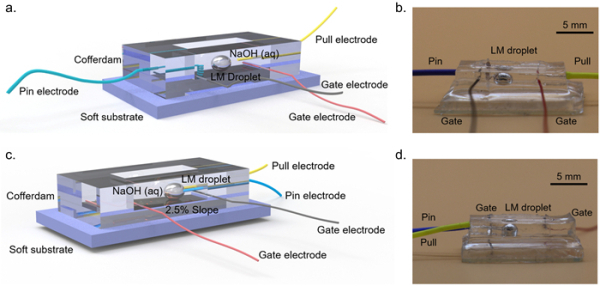
图1.液态金属逻辑器件的结构设计与实物图
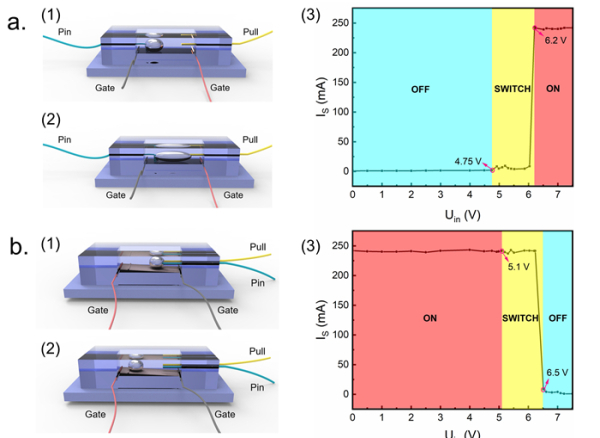
图2.液态金属逻辑器件的工作原理与响应特性曲线
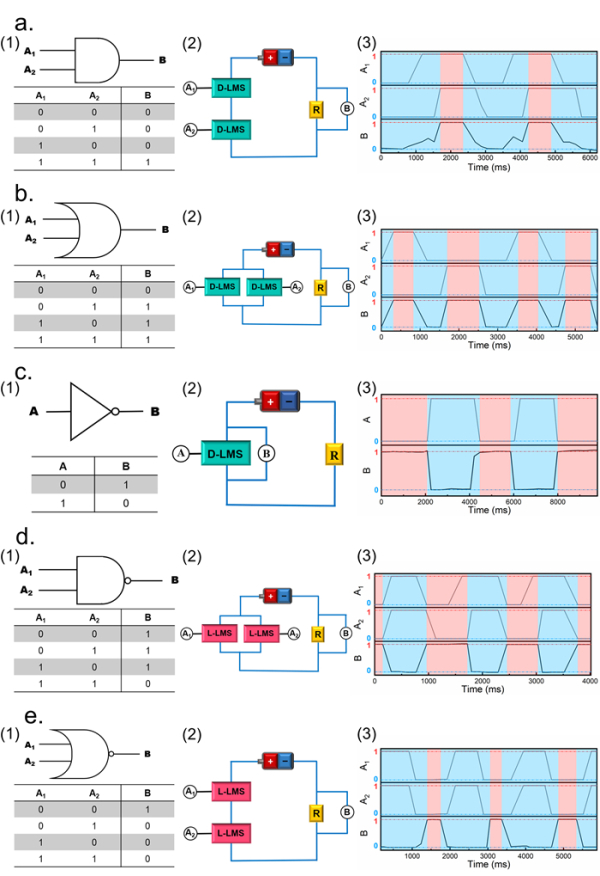
图3.基于液态金属逻辑器件可实现的多种逻辑门结构
来源:中国科学院
原文链接:http://www.cas.cn/syky/202103/t20210324_4782239.shtml
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn



