来源:X一MOL资讯
软体机器人由于多自由度、大变形以及优越的人机交互兼容性而受到了广泛关注。近些年来,有许多智能材料以及结构被用来制备软体驱动器,比如气动驱动器、介电弹性体、智能水凝胶等等。然而这些材料或者结构或多或少具有局限性,比如气动驱动器需要压缩空气泵和控制阀门等,从而导致了很难做成较小尺寸的独立系统;驱动介电弹性体需要较高的电压(通常是几千伏);智能水凝胶驱动变形需要水环境等等。这些因素限制了软体驱动器的发展。
液晶弹性体,作为一种新型的智能材料,由于在外界刺激的情况下(温度、光等等)能产生较大的形变受到了广泛的关注,它被广泛用作一种新型的软体驱动器。液晶弹性体在加热状态下能发生液晶向各项同性的相变,从而产生巨大的收缩。近日,加州大学圣迭戈分校Shengqiang Cai课题组通过空间排布液晶弹性体制备了软体管状驱动器,利用电加热的原理刺激单独的电加热丝从而实现了多方向多自由度弯曲以及均匀的收缩变形。值得注意的是驱动电压较小(小于3伏特)。这种管状驱动器能够用来构建独立系统的机器人。
图一描述了管状驱动器的制备以及驱动原理。当施加电压到一条电加热丝时,附近的液晶弹性体被加热进而产生收缩,从而驱动管状驱动器产生弯曲变形;当电压施加于所有的电加热丝时,整个结构的液晶弹性体被加热而产生收缩,进而产生了收缩的变形。
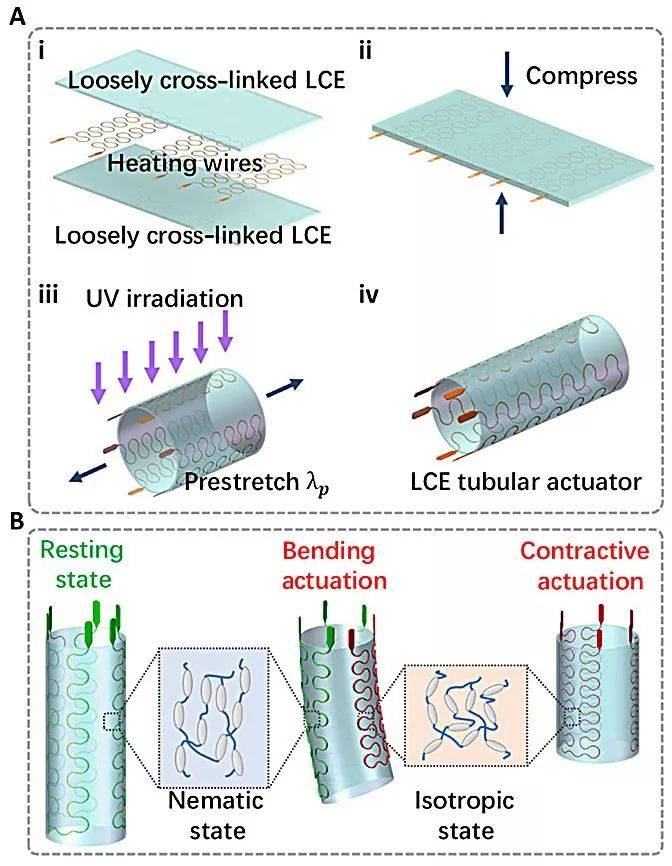
图一
图二是管状驱动器弯曲以及收缩的表征(测量弯曲角度以及收缩程度),通过对于每个电加热丝进行编程化精确的控制,管状驱动器能产生多方向不同角度、不同收缩程度的变形。
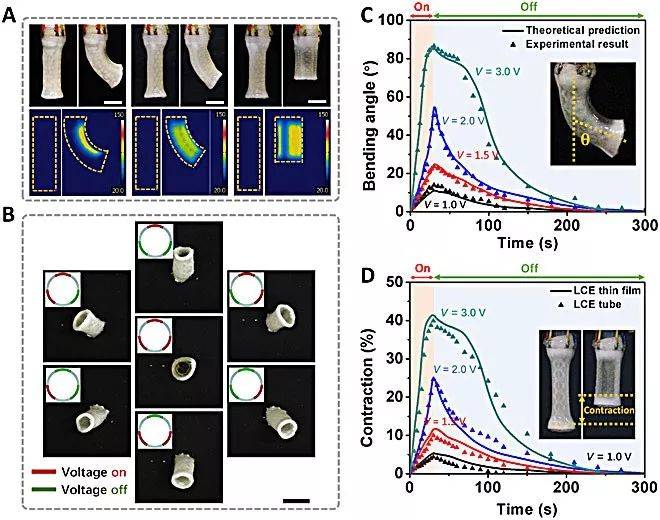
图二
利用管状驱动器多自由度、低驱动电压驱动的优势,作者最后构建了独立系统的机器人,它包含了四个管型驱动器、电池以及微型控制单元,这个机器人能够实现不同的功能,比如能够在路面上行走以及操控物体等等(图三)。
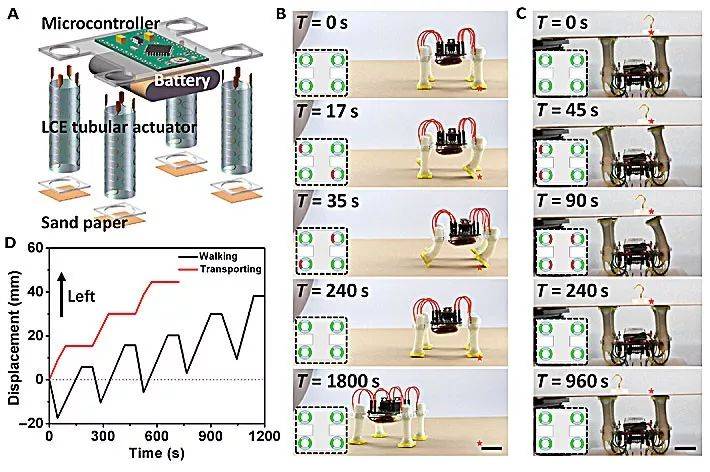
图三
该工作近期发表在Science Advances 上 。
来源:X-molNews X一MOL资讯
原文链接:https://mp.weixin.qq.com/s?__biz=MzAwOTExNzg4Nw==&mid=2657623951&idx=4&sn=4a1873913c0dca01a95b55c5dda7f64c&chksm=80f8365fb78fbf49290358f3a8a0e79c6f4f38374ad36cd6358236e9d49ece7b7a9434581c1c#rd
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn





