来源:中科院之声
近日,中国科学院沈阳自动化研究所科研团队在微型机器人及微操作领域取得新进展,相关成果以2D to 3D Manipulation and Assembly of Microstructures Using Optothermally Generated Surface Bubble Microrobots 为题发表于国际学术期刊Small。
工程技术与生命科学相结合已成为科技创新的前沿方向之一,将载有细胞的微凝胶结构排列、组装成特定的构型并培养成具有特定生物功能的组织结构,对于药物研发、生物传感以及类生命机器人研究等方面具有重要的意义。
然而,微结构的操作和组装,特别是三维姿态的控制和复杂构型的装配,依然面临着诸多挑战。
沈阳自动化所微纳米课题组针对上述问题利用液体环境中的气泡作为微型机器人,对微结构进行三维操作和组装。
科研人员研究了光热效应产生和控制气泡的方法,利用气泡微型机器人对水凝胶微结构进行了多种操作,包括二维移动、旋转和三维翻转等,实现了对微结构的三维姿态控制。综合上述操作方法,通过气泡微型机器人可将多个微模块组装成复杂的三维结构,为微结构的操作及装配、体外构建生物组织结构提供了新的解决方案。
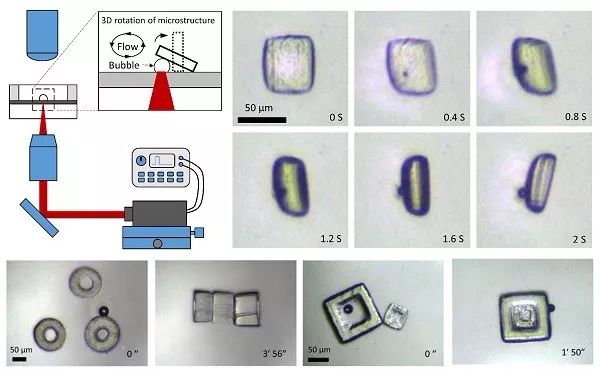
通过气泡微型机器人进行微操作和装配
来源:中国科学院沈阳自动化研究所
来源:zkyzswx 中科院之声
原文链接:http://mp.weixin.qq.com/s?__biz=MjM5NzIyNDI1Mw==&mid=2651764216&idx=3&sn=e9ec8a3827c93234cd3d62dd96a06425&chksm=bd275faa8a50d6bc470fc5d07feb622f2d6b6156af975632a451d0e0e5b3b7f73a3b2e28a6d8&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

