来源:材料科学与工程
在亿万年的自然演化中,一些生物体逐渐发展出体色、形态等随环境变化的能力。其中,最典型的例子就是变色龙:它能够根据外部环境或情绪心理的变化来快速改变肤色,以达到伪装或交流的目的。研究表明,变色龙的皮肤具有特殊的多层色素细胞构造,环境或情绪的变化会诱导皮肤肌肉运动,改变皮肤多层色素细胞的分布,进而实现多样化的身体颜色变化。
这一有趣的生物体变色现象启发科学家们构建了多种基于高分子薄膜和弹性体的智能仿生软体机器人,这些具有变色功能的伪装机器人在自然环境中表现出类生物体的行为,不易被识别和破坏,因而在海洋探索、生物学研究、环境考察等方面应用前景巨大。相较于高分子薄膜和弹性体,高分子水凝胶具有与生物组织相当的模量及软、湿等特性,可能更加适宜于变色软体机器人的构建。因此,如何通过各向异性高分子水凝胶的组成结构设计,实现驱动与智能荧光色变等功能的协同来构建具有变色功能的水凝胶驱动器,就成为我们格外关注的关键问题。
近年来,中国科学院宁波材料技术与工程研究所智能高分子材料课题组陈涛研究员和路伟副研究员在智能荧光高分子水凝胶的分子设计及材料构建方面开展了大量的基础研究工作(Adv. Funct. Mater. 2019, 1905514; ACS Macro Lett. 2019, 8, 937; Sci. China Mater.2019, 62, 831; ACS Sensors 2018, 3, 2394; Adv. Mater. Technol. 2018, 1800201; J. Phys. Chem. C 2018, 122, 9499; Macromol. Rapid Commun.,2018, 39, 1800648; Macromol. Rapid Commun.2018, 39, 1800130; ACS Appl. Mater. Interfaces 2017, 9, 23884)。基于以上研究,该团队在2018年通过苝酰亚胺功能化荧光高分子水凝胶和氧化石墨烯杂化聚异丙基丙烯酰胺水凝胶功能模块的超分子宏观组装,初步实现了复杂形变和智能荧光性能的协同(Adv. Funct. Mater. 2018, 1704568)。然而,尽管这种高分子驱动器同时兼具复杂变形和“开-关”荧光功能,它却只能发出一种荧光颜色(黄色),远远落后于自然界中的变色龙等可显示丰富多彩肤色变化的生物体。
近日,该团队在Angew. Chem. Int. Ed. 上报道了一种兼具3D复杂形变-智能色变功能的多色荧光高分子水凝胶驱动器(图1),题为“Bioinspired Synergistic Fluorescence-Color Switchable Polymeric Hydrogel Actuator”。
论文链接
https://www.onlinelibrary.wiley.com/doi/10.1002/anie.201908437
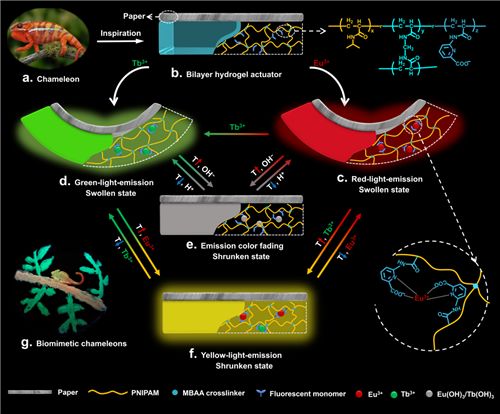
图1 由变色龙启发的具有协同变形变色功能的水凝胶驱动器示意图
在该工作中,研究人员从多色荧光单体分子设计的源头出发,合成了一种含有吡啶羧酸盐配体的单体6APA,其与N-异丙基丙烯酰胺(NIPAM)、甲双叉丙烯酰胺经自由基聚合制备的温敏性高分子水凝胶(PNIPAM-K6APA)的荧光强度很弱,但稀土铕(Eu3+)和铽离子(Tb3+)的分别掺杂会诱导吡啶羧酸盐配体的能量转移,进而发出明亮的红色和绿色荧光,进一步地,可以通过不同比例铕和铽离子与吡啶羧酸盐配体的竞争配位作用的调控来获得红色和绿色相叠加的多色荧光。该荧光水凝胶具有丰富的刺激响应性,酸碱、竞争配位阴/阳离子等的刺激都会改变其荧光颜色(图2)。
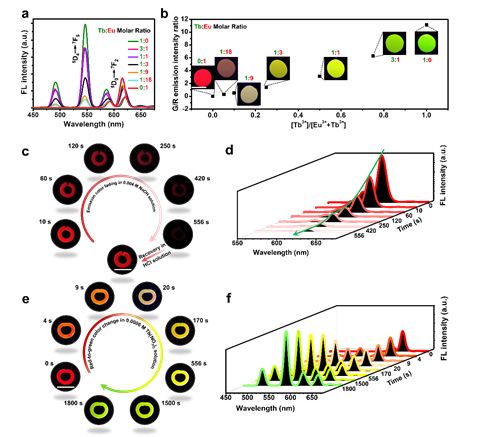
图2 水凝胶的荧光颜色调控及其刺激响应性荧光色变
基于这一智能荧光色变原理,研究人员以温敏性PNIPAM-K6APA为主动层、称量纸为被动层构建了一种各向异性荧光高分子水凝胶驱动器。如图3所示,在碱和温度的交互刺激下,一对分别基于红色荧光Eu-PNIPAM-K6APA和绿色荧光Tb-PNIPAM-K6APA驱动器的仿生变色龙表现出协同的肤色变暗和身姿形变,模仿出变色龙在意欲发动攻击时心理情绪变化诱导的肤色变暗现象;类似地,在铽离子和温度的交互刺激下,基于红色荧光Eu-PNIPAM-K6APA驱动器的仿生变色龙表现出与协同的身姿形变和“红转黄绿”肤色改变,初步模仿出变色龙在环境变化诱导下的皮肤颜色变化多样性(图4)。
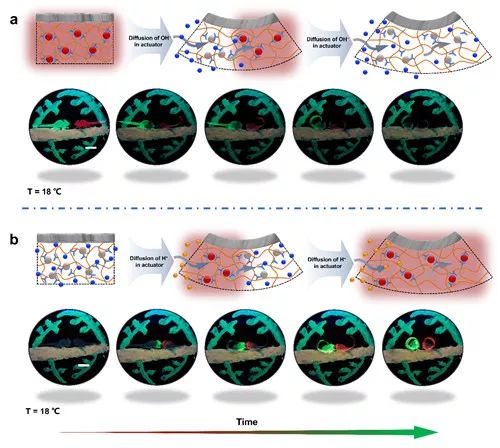
图3 分别基于Eu-PNIPAM-K6APA和Tb-PNIPAM-K6APA水凝胶驱动器的一对仿生变色龙在碱和温度交互刺激下的协同变形变色行为
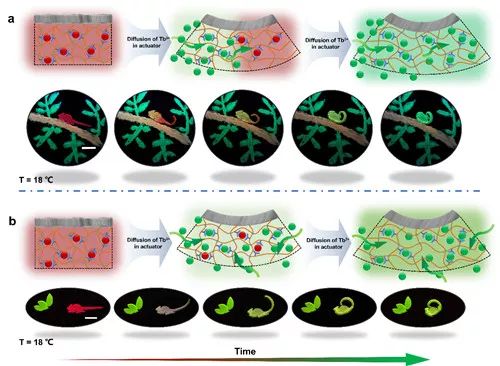
图4 基于Eu-PNIPAM-K6APA水凝胶驱动器的仿生变色龙在铽离子和温度交互刺激下的协同变形变色行为
在该工作中,研究人员通过各向异性多色荧光高分子水凝胶驱动器的组成结构设计,协同利用竞争配位调控的荧光色变和温度控制的形状改变,制备了一种具有类变色龙行为的高分子水凝胶基软体机器人。尽管现在的变色软体机器人在结构设计和功能展示上还比较粗糙,但这一成功实例证明了变形变色等多功能协同的软体机器人的可行性,为未来多功能软体机器人的开发和应用奠定了基础。
以上工作得到了国家自然科学基金(21774138, 51773215, 51873223)、中科院前沿科学重点研究项目(QYZDB-SSW-SLH036)、中国科学院青年创新促进会(2019297, 2017337)、中科院海洋新材料与应用技术重点实验室开放基金(2018K02)等项目的资助。
来源:mse_material 材料科学与工程
原文链接:https://mp.weixin.qq.com/s?__biz=MzA4NDk3ODEwNQ==&mid=2698822128&idx=3&sn=076f42a6f2a7059f41e183ad56fb6611&chksm=baf691268d811830bc3dbf5c5ce5192dc32cf305fd2c68f631cc193373bb2b30f79eb4a57c65&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

