来源:农业工程学报
《农业工程学报》2020年第36卷第7期刊载了哈尔滨理工大学等单位鲍玉冬、杨杰、赵彦玲、刘献礼、郭艳玲、李志鹏与向敬忠的论文——“基于轮壤接触力学行为的蓝莓采收机行走驱动系统设计”。该研究由国家自然科学基金(项目号:51505110)等资助。
蓝莓是劳动密集型产业,果实的采收是产业链中成本最高、耗时最多的环节,严重影响蓝莓产业,果实的经济效益。目前中国蓝莓采收主要依靠人工采收,蓝莓采收机的研究仍处于起步阶段,尚未形成高效机械化采收链条。国外蓝莓机械化采收研究起步较早,技术成熟。蓝莓种植基地规模较大,树间距大、垄间路面平整,农机与农艺匹配。中国蓝莓种植基地多为高密度种植模式,地表形态规整度差,国外技术成熟的采收机即使引进也无法高效使用。由于蓝莓采收时间主要集中在全年降水量最多的7、8月份,采收机作业路面质量差,车轮容易发生打滑和沉陷,整机通过性差,直接影响果实采收效率,阻碍蓝莓采收机有效发挥其自身优良性能,制约中国蓝莓种植产生规模化效益。
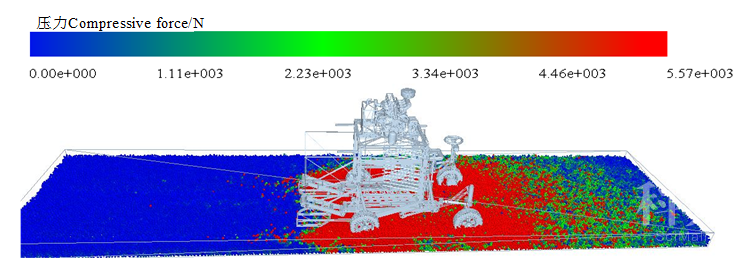
该研究通过分析车轮驱动力矩、负载、沉陷量及挂钩牵引力等力学行为,得到车轮通过性影响因素为土壤属性、车轮结构参数和行走速度;以车轮结构参数、行走速度为试验因素,采用离散元法建立蓝莓采收机轮壤接触模型。车轮结构参数或行走速度增加时,车轮阻力矩和土壤波动速度随之增加。
依据车轮阻力矩设计行走驱动系统,采用闭式静液压四轮行走驱动系统,通过工况适应性仿真验证各车轮输出特性一致,稳定行走;系统可以克服车轮沉陷,平稳越障。通过样机田间试验得到行走驱动系统满足行驶速度范围要求,运行平稳,行走驱动系统与采收系统匹配性良好。研究表明建立的轮壤接触模型可靠,行走驱动系统作业通过性效果较好。

来源:gh_c45100f8f9c0 农业工程学报
原文链接:http://mp.weixin.qq.com/s?__biz=MjM5NjU1MzcwNQ==&mid=2652996735&idx=2&sn=b90c8d533d65ceda741156ad3b3b53c4&chksm=bd3252f98a45dbef834557013d265500477a0bafd566d883c843a362b288673b9ee0c2fbe51f&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn



