来源:X一MOL资讯
软体机器人通常以模量为104~109 Pa范围内的柔性材料为致动单元,以与生物系统相匹配,提升其实际可操作性。目前,碳基双层膜体系(例如氧化石墨烯、还原氧化石墨烯及碳纳米管)、交联弹性体、水凝胶体系及功能改性橡胶等诸多体系已经广泛应用于软体机器人的构筑应用中。近来,各种智能响应材料体系的引入也极大地推动了柔性机器人领域向着无线、远程操控以及小型化等方向发展。但是,目前多数柔性致动器件的设计和结构仍较为简单,实现复杂3D结构智能软体机器人的构筑仍是一项挑战性工作。
近日,台北科技大学Yu-Chieh Cheng博士和芬兰坦佩雷大学Hao Zeng博士等研究者以基于液晶聚合物网络(liquid crystal polymer network, LCN)的光敏性膜为柔性材料并形成“剪纸(Kirigami)”图案,在光照下可发生2D到3D的结构转换并引起机械致动,实现了具有复杂结构和运动特征光响应性软体机器人。相关论文发表于Advanced Materials。
LCN存在刚性液晶基元有序排列(有序参数)的结构特性,在构筑柔性致动器件方面具有独特的优势。将刺激响应性组分引入液晶体系是实现LCN体系智能可控的经常用策略。在该研究中,研究人员以分散红1(DR1)为光热染料、采用内表面预处理的液晶盒原位聚合物制备含偶氮光敏性交联液晶体系;软体LCN膜厚度为几百微米级,尺寸为几厘米范围,便于后续机器雕刻或激光裁剪以形成“剪纸”图案。整个膜厚范围液晶体系呈均一分子取向,赋予膜器件高效的弯曲致动性。
采用“剪纸”手法,沿光响应LCN薄膜轴线构筑末端三角形的条带结构,之后偶氮苯膜蜷曲呈管状(用塑料环加固)。当条状花瓣结构受到光照(470 nm)刺激时,条状膜弯曲形变产生推力驱动管状器件连续滚动。对器件在不同辐照条件下的光致动性能进行测试,花瓣状结构弯曲驱动器件运动幅度与入射光强呈依赖性、各种光致运动皆能在几秒内完成。在入射光强及入射光角度的调控下,器件可实现1~ 6 mm s-1 不同速率的运动。
这种光响应LCN薄膜管状器件除了可以简单的实现可控滚动,研究人员对器件光驱动的不同模式运动进行了测试。研究表明,基于器件花瓣状结构光致弯曲(运动幅度)的光强依赖性,通过局部辐照光强的调控实现器件部件产生不对称形变,进而可实现器件运动方向的光控调节;适度光强(450-550 nm,几百mW cm-2)辐照条件下,该器件可实现“S”形、“P”形可控致动以及爬坡运动(1 mm s-1)。
近日,台北科技大学Yu-Chieh Cheng博士和芬兰坦佩雷大学Hao Zeng博士等研究者以基于液晶聚合物网络(liquid crystal polymer network, LCN)的光敏性膜为柔性材料并形成“剪纸(Kirigami)”图案,在光照下可发生2D到3D的结构转换并引起机械致动,实现了具有复杂结构和运动特征光响应性软体机器人。相关论文发表于Advanced Materials。
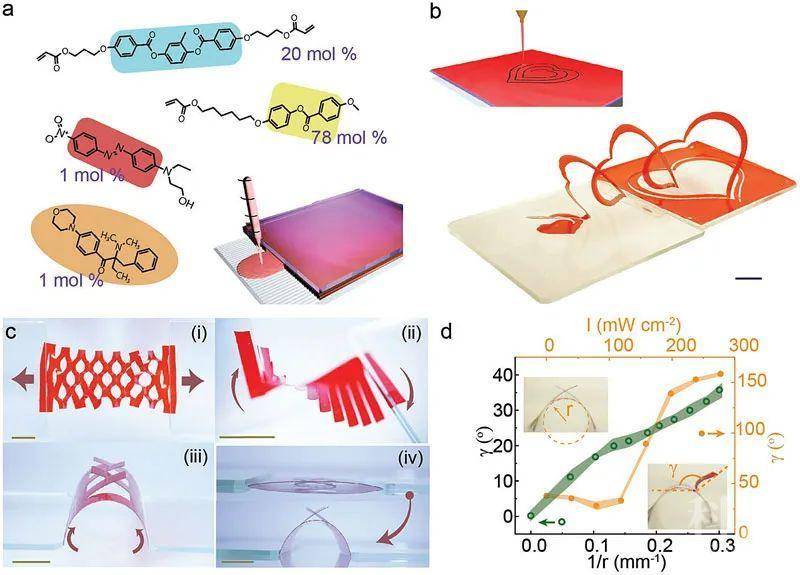
LCN存在刚性液晶基元有序排列(有序参数)的结构特性,在构筑柔性致动器件方面具有独特的优势。将刺激响应性组分引入液晶体系是实现LCN体系智能可控的经常用策略。在该研究中,研究人员以分散红1(DR1)为光热染料、采用内表面预处理的液晶盒原位聚合物制备含偶氮光敏性交联液晶体系;软体LCN膜厚度为几百微米级,尺寸为几厘米范围,便于后续机器雕刻或激光裁剪以形成“剪纸”图案。整个膜厚范围液晶体系呈均一分子取向,赋予膜器件高效的弯曲致动性。
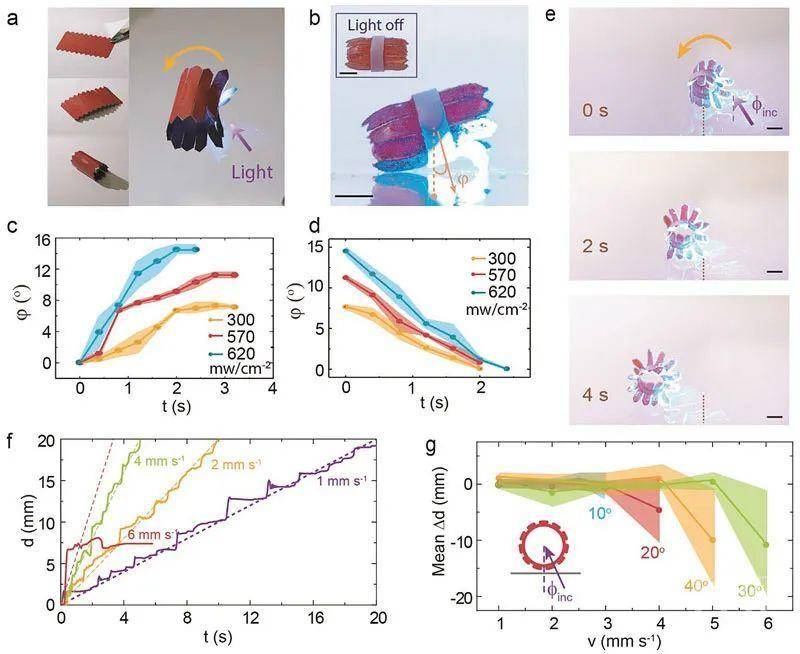

采用“剪纸”手法,沿光响应LCN薄膜轴线构筑末端三角形的条带结构,之后偶氮苯膜蜷曲呈管状(用塑料环加固)。当条状花瓣结构受到光照(470 nm)刺激时,条状膜弯曲形变产生推力驱动管状器件连续滚动。对器件在不同辐照条件下的光致动性能进行测试,花瓣状结构弯曲驱动器件运动幅度与入射光强呈依赖性、各种光致运动皆能在几秒内完成。在入射光强及入射光角度的调控下,器件可实现1~ 6 mm s-1 不同速率的运动。
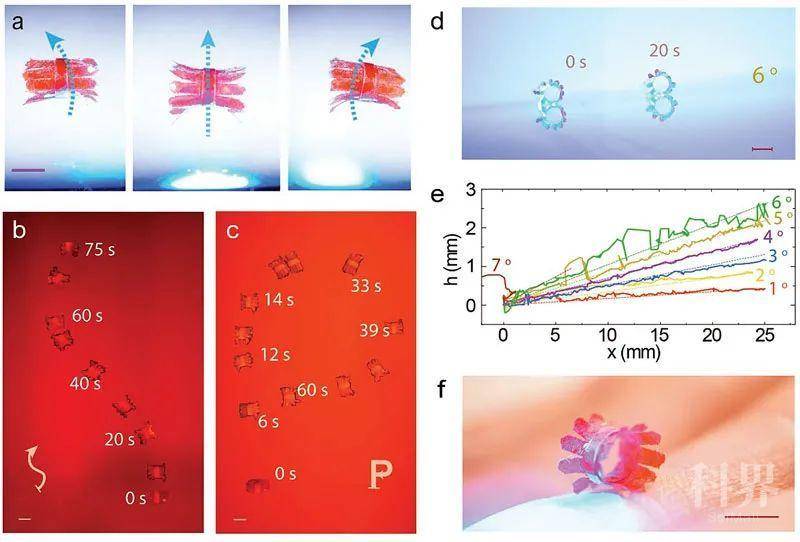
这种光响应LCN薄膜管状器件除了可以简单的实现可控滚动,研究人员对器件光驱动的不同模式运动进行了测试。研究表明,基于器件花瓣状结构光致弯曲(运动幅度)的光强依赖性,通过局部辐照光强的调控实现器件部件产生不对称形变,进而可实现器件运动方向的光控调节;适度光强(450-550 nm,几百mW cm-2)辐照条件下,该器件可实现“S”形、“P”形可控致动以及爬坡运动(1 mm s-1)。
总结
软体机器人的致动性能往往受其材质及设计结构的共同影响。该研究采用传统的光敏性液晶聚合物网络为材质,借助人们熟知的“剪纸术”,构筑了具有复杂3D结构的光致动器件。这种新型软体致动器件在执行复杂运动及“爬坡”运动指令方面展现出的卓越性能,表明了“剪纸术”在智能响应膜材料设计中的应用前景。
原文:Kirigami-Based Light-Induced Shape-Morphing and LocomotionYu-Chieh Cheng, Hao-Chuan Lu, Xuan Lee, Hao Zeng, Arri PriimagiAdv. Mater., 2020, DOI: 10.1002/adma.201906233
来源:X-molNews X一MOL资讯
原文链接:http://mp.weixin.qq.com/s?__biz=MzAwOTExNzg4Nw==&mid=2657632089&idx=2&sn=94e70a602e67a0c79ade66328fb1ebb4&chksm=80f81689b78f9f9fe97c29fb3a7000ca354e449bb062c32bd9432db32e40ad59ce8770c226d4&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn



